سه چرخه کنترلی با دسته PS3 + سنسور اندازه گیری فاصله
کاوه طاهریدر۱۴۰۳/۲/۱۸
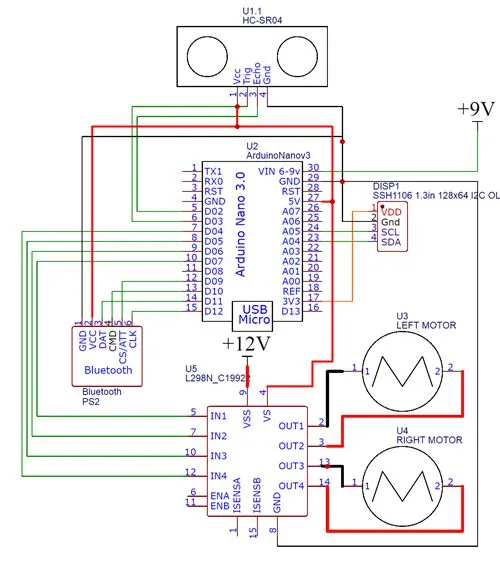
پروژه ماشین کنترلی با دسته PS3 با سنسور جلوگیری از تصادف، در پروژه سه چرخه کنترلی از Arduino نانو استفاده شده است.
Arduino Nano
این مدل از بوردهای آردوینو یکی از بورد ها ساده و ارزان قیمت جهت تجاری محصولات بخصوص ربات های پروازی می باشد. در این مدل پورت از آی سی FT232 وboot loader به منظور پروگرام کردن میکرو درنظر گرفته شده همچنین امکان اتصال آداپتور خارجی در این بورد حذف شده است.
باتری های لیتیومی 18650
باتری های لیتیومی 18650در پاور بانک ها، لپ تاپ ها و وسایل شارژی مانند جاروبرقی های کوچک استفاده می شود. در این ربات نیز از 5 عدد از این باتری ها استفاده شده است. برای شارژ این نوع باتری از ماژول TP4056 استفاده کردم.
L298N Motor Driver
این نوع درایور قابلیت کنترل 2 موتور به صورت همزمان را دارد، علاوه بر 5 ولت VCC قابلیت دریافت 12 ولت از پین جداگانه دارد. این ولتاژ اضافه جهت تامین نیروی موتور ها استفاده می شود.
OLED – SH1106
صفحه نمایشگر تک رنگ SH1106 با استفاده از 2 پین اطلاعات را از Arduino دریافت کرده و نمایش می دهد. این نمایشگر از پروتکل I2C پشتیبانی می کند.
پروتکل I2C
I2C پروتکل سریال برای ارتباط تجهیزات سرعت پایین مانند IO از طریق 2 رشته سیم است. در این پروتکل یک تجهیز Master یا ارباب و مابقی تجهیزات Slave یا برده می شوند. از طریق این پروتکل 127 تجهیز قابل دسترسی خواهند بود.
HC-SR04
سنسور مافوق صوت یا اولتراسونیک قابلیت ارسال و دریافت پالس صوتی را دارد. با این سنسور می تواند فاصله اشیا را اندازه گرفت
فرانکلین رباتیکس، شرکت رباتیک ماساچوست، به تازگی دست به ایجاد کمپینی برای تامین مالی جمعی یک پروژه رباتیک زده است. این بار اما خبری از رباتهایی برای تمیز کردن کف خانه یا فرش نیست؛ بلکه این پروژه در نظر دارد رباتی برای از بین بردن علفهای هرز باغچه تولید کند.
این ربات با نام ترتیل (Tertill)، کمی بیشتر از یک کیلو وزن دارد و از حسگرهایی استفاده میکند تا علفهای هرز را در سبزیجات یا گلها تشخیص دهد. سپس با استفاده از یک سیم مخصوص که در برخی دستگاههای چمن زنی هم به کار میرود، اقدام به قطع آنها میکند. این ربات هیچگونه دوربین یا هوش مصنوعی نخواهد داشت و تنها از حسگرهایی برای تشخیص بلندی یا کوتاهی گیاهان استفاده میکند.
اما سوال اساسی که در ذهن خواننده این مطلب نقش میبندد این است که چگونه این ربات بین علفهای هرز و سبزیجات باغچه فرق میگذارد؟ جو جونز، مدیر ارشد فناوری در پاسخ به این سوال میگوید: “در باغچه میتوان بر اساس اندازه گیاهان تشخیص داد که آنها علف هرز هستند یا گیاهی مفید. پس به این ترتیب هر گیاه کوتاهی که به زیر ربات برود علف هرز محسوب شده و بقیه گیاهان بلندتر مفید تلقی خواهند شد.” وی در خصوص گیاهانی که تازه کاشته شدهاند نیز گفت: “برای این که ترتیل به اشتباه آنها را از بین نبرد، گردنبندی ساخته میشود که شما میتوانید دور گیاهان نورسته بیاندازید تا ترتیل از نزدیک شدن به آن ناحیه خودداری کند.”
گفتنی است ترتیل رباتی بر پایه انرژی خورشیدی خواهد بود و میتواند هر روز بدون نیاز به شارژ یا باتری وظایف خود را انجام دهد.
تیم سازنده این ربات که سابقه ساخت رباتی برای تمیز کردن کف خانه را نیز در پرونده دارد، امیدوار است تا در آینده و در صورت موفقیت محصول، ویژگیهای دیگری نیز به این ربات اضافه کند. مارس ۲۰۱۸ تاریخی است که این ربات به بازارهای جهانی عرضه خواهد شد. رباتی ویژه که علفهای هرز باغچه را از بین میبرد پنج شنبه , ۲۵ خرداد ۱۳۹۶ 0 ترتیل رباتی برای از بین بردن علف هرز فرانکلین رباتیکس، شرکت رباتیک ماساچوست، به تازگی دست به ایجاد کمپینی برای تامین مالی جمعی یک پروژه رباتیک زده است. این بار اما خبری از رباتهایی برای تمیز کردن کف خانه یا فرش نیست؛ بلکه این پروژه در نظر دارد رباتی برای از بین بردن علفهای هرز باغچه تولید کند.
این ربات با نام ترتیل (Tertill)، کمی بیشتر از یک کیلو وزن دارد و از حسگرهایی استفاده میکند تا علفهای هرز را در سبزیجات یا گلها تشخیص دهد. سپس با استفاده از یک سیم مخصوص که در برخی دستگاههای چمن زنی هم به کار میرود، اقدام به قطع آنها میکند. این ربات هیچگونه دوربین یا هوش مصنوعی نخواهد داشت و تنها از حسگرهایی برای تشخیص بلندی یا کوتاهی گیاهان استفاده میکند.
اما سوال اساسی که در ذهن خواننده این مطلب نقش میبندد این است که چگونه این ربات بین علفهای هرز و سبزیجات باغچه فرق میگذارد؟ جو جونز، مدیر ارشد فناوری در پاسخ به این سوال میگوید: “در باغچه میتوان بر اساس اندازه گیاهان تشخیص داد که آنها علف هرز هستند یا گیاهی مفید. پس به این ترتیب هر گیاه کوتاهی که به زیر ربات برود علف هرز محسوب شده و بقیه گیاهان بلندتر مفید تلقی خواهند شد.”
ترتیل رباتی برای از بین بردن علف هرزترتیل رباتی برای از بین بردن علف هرز
وی در خصوص گیاهانی که تازه کاشته شدهاند نیز گفت: “برای این که ترتیل به اشتباه آنها را از بین نبرد، گردنبندی ساخته میشود که شما میتوانید دور گیاهان نورسته بیاندازید تا ترتیل از نزدیک شدن به آن ناحیه خودداری کند.”
گفتنی است ترتیل رباتی بر پایه انرژی خورشیدی خواهد بود و میتواند هر روز بدون نیاز به شارژ یا باتری وظایف خود را انجام دهد.
تیم سازنده این ربات که سابقه ساخت رباتی برای تمیز کردن کف خانه را نیز در پرونده دارد، امیدوار است تا در آینده و در صورت موفقیت محصول، ویژگیهای دیگری نیز به این ربات اضافه کند. مارس ۲۰۱۸ تاریخی است که این ربات به بازارهای جهانی عرضه خواهد شد.منبع: آیتی رسان
مجموعه دانش مدیریت پروژه (PMBOK) پروژه را به صورت زیر تعریف میکند: یک تکلیف جدید میتواند یک سرمایه گذاری کوتاه مدت باشد که برای ایجاد یک محصول منحصر به فرد، کمک یا حتی نتیجه انجام میشود. PMBOK تکلیف را به صورت زیر مشخص میکند : تکلیف میتواند درون آن یا در خدمات مختلفی مثل تحویل و توزیع وظیفهی کاری مورد استفاده قرار گیرد. نتیجهی پروژه، اطلاعات و دانشی تولید میکند که میتواند در موقعیتهای اجتماعی ضعیف مختلف مورد استفاده قرار گیرد. یک پروژه دارای حوزهی معینی است که توسط منابع معدودی محدود شده است و افراد مختلف دارای مهارت مختلف را در بر میگیرد و معمولاً به تدریج در سراسر چرخهی زندگی خود پیچیدهتر میشود. مثل پروژه، تعاریف بسیار زیاد و متفاوتی برای مدیریت پروژه داده شده است. این تحقیق با خلاصه بندی این تعاریف، مدیریت پروژه را به صورت کاربرد و ادغام مدیریت مدرن و دانش، مهارتها، ابزارها و فنون مدیریت پروژه با برنامه ریزی کلی، هدایت، هماهنگی، نظارت و کنترل کلیهی ابعاد یک پروژه از آغاز تا تکمیل آن، و انگیزهی افراد دخیل در تولیدی محصول، خدمات یا نتیجهی پروژه در زمان مقرر، با هزینهی مجاز، و کیفیت و شرایط مورد نیاز، و رضایت شرکت کنندگان تعریف میکند. یک سیستم اطلاعات لازمهی مدیران پروژه حمایت در برنامه ریزی، سازماندهی، کنترل، گزارش و تصمیم گیری است. همانطور که کلیولند و کینگ تعریف کرده است، وظیفهی اساسی PMIS ارائهی «اطلاعات ضروری دربارهی پارامترهای عملکرد هزینه زمان یک پروژه و دربارهی ارتباط متقابل این پارامترها» برای مدیران است. ماهیت و نقش PMIS در سیستم مدیریت پروژه، به صورت اساساً «مفید در دستیابی به اهداف پروژه و پیاده سازی راهبردهای پروژه» تعریف شده است . PMIS درون سیستم مدیریت پروژه نشان میدهد چگونه PMIS از دادههای پروژه در مراحل مختلف در یک چرخهی عمر پروژه استفاده میکند. همچنین ، دادههای سازمانی یا محیطی را برای کمک در تصمیم گیری (در ارتباط با برنامه ریزی، سازمان دهی، کنترل و نظارت، ارزیابی و گزارش) توسط مدیر پروژه برای برآورده سازی مشخصات و ضرب العجل های پروژه نشان میدهد.
هدف یک PMIS
یک PMIS عمدتاً یک ابزار نظارت و ارزیابی است که در سراسر پیشرفت یک پروژه مورد استفاده قرار می گیرد. یک PMIS با استفاده از عملکردهای نظارت و کنترل، برای جمع آوردی دادهها از عملکردهای مختلف تحلیل کننده و ارائه کنندهی آن دادهها در یک قالب مناسب برای همهی طرفهای دخیل در پروژه به کار میرود. نظارت عبارت است از فرآیند جمع آوری، ذخیره سازی، تحلیل و گزارش منظم اطلاعات پروژه که برای تصمیم گیری برای مدیریت پروژه مورد استفاده قرار میگیرد. نظارت کردن، اطلاعات لازم جهت ارزیابی پیشرفت پروژه، شناسایی گرایشها، الگوها و انحرافها، در برنامه نگه داشتن پروژه و اندازه گیری پیشرفت در جهت اهداف مورد انتظار را برای مدیریت پروژه و ذینفعان آن فراهم میکند. نظارت بر اطلاعات، اجازهی تصمیم گیری دربارهی کاربرد منابع پروژه (انسانی، مواد و مالی) به منظور افزایش اثربخشی آن را میدهد. مردیت و منتل می گویند وقتی اطلاعات درست در زمان درست در دسترس افراد درست است میتواند از تصمیمهایی مثل تغییر راهبردهای پیاده سازی پشتیبانی کند که به نوبهی خود میتواند به کاهش هزینههای پروژه و افزایش سودمندیهای آن کمک کند . نظارت بر پروژه، یک سنجش پیوسته از پیاده سازی پروژه در ارتباط با نقشههای مورد توافق و پیش شرطهای مورد توافق خدمات برای ذینفعان پروژه است. به همین شکل، نظارت پروژه، اطلاعات پر بهایی برای مدیران و سایر ذینفعان پروژه درارتباط با پیشرفت پروژه فراهم میکند. به علاوه، موفقیتها و مشکلات بالقوه را تشخیص میدهد تا به موقع به سازگاری عملیاتهای پروژه کمک کند. ارزیابی عبارت است از سنجش دورهای ارتباط، عملکرد، سودمندی و تأثیر پروژه (هم مورد انتظار و هم غیرمنتظره) در ارتباط با اهداف و مشخصات اظهار شدهی پروژه. ارزیابی از فرآیند جمع آوری دادهها سود میبرد تا سنجش میزان پیشرفت پروژه و رسیدن آن به اهدافش را تسهیل کند. نتایج آن به مدیران پروژه، ذینفعان، شریکان، اهدا کنندگان و کلیهی سهامداران پروژه اجازه میدهد از تجربه درس بگیرند و مداخلات آینده را بهبود ببخشند. مردیت و منتل می گویند که اطلاعات کیفی و کمّی از جمله مؤلفههای حیاتی یک ارزیابی هستند. بدون آن، تعیین سهم مداخلات پروژه در پروژه تقریباً غیرممکن است.(سیارک)
ربات ها در حال ورودند، اما این به چه معناست؟ بسیاری از متخصصان معتقدند که آنها وارد زندگی شده اند و قادرند انواع گوناگونی از فعالیت ها را انجام دهند، مواردی مانند مدیریت در مراقبت های مربوط به سلامت ( برای مثال بررسی کامل شدن دوره درمانی)، به عهده گیری امنیت، ارائه خدمات آموزشی، فرمان بری و فراهم آوردن سرگرمی ها. ربات ها البته در تولید، عملیات تجسس و عملیات نجات در ارتش ها هم کاربرد دارند. وقتی که در مورد دستگاه های گران قیمت برای استفاده شخصی صحبت میکنیم، به هر حال بسیاری از این کاربردها بیشتر به رویا شبیه هستند، با مکانیزم ها و روش های غیر مطمئن کمتر میتوان به قطعیت در مورد چیزی دست یافت. با این پیش فرض که هر محصول موفق برای منازل باید مقرون به صرفه، قابل اتکا، امن و قابل استفاده برای همه باشد، یک ربات خانگی چه کارهایی باید انجام دهد؟ آیا باید شبیه یک خدمتکار خانگی باشد؟ در یک خانه احتمالا باید از یک اصول و مسیر خاص تبعیت کند. یک ربات آشپزخانه احتمالا باید در یک مسیر تعریف شود، با بخش های دستگاه ظرف شور، آبدارخانه، قهوه ساز و تهیه غذا، به این صورت که هرکدام بتوانند با بقیه ارتباط برقرار کنند و هر مورد را بین خود انتقال دهند. یک ربات مخصوص سرگرمی احتمالا باید چهره ای شبیه انسان ها داشته باشد. و رباتی که جارو میکند یا چمن زنی میکند احتمالا باید شبیه به جارو برقی و ماشین چمن زنی باشد. ساختن ربات هایی که به درستی کار کنند واقعا کار سختی است. وسایل مربوط به سنسور آنها محدودند چون سنسورها گران قیمت اند و تفسیر کردن آنها ( مخصوصا در قسمت قضوات صحیح و معقول) در مرحله آزمایشی است و هنوز به توسعه نرسیده است. بازوهای رباتیک گران قیمتند و چندان قابل اتکا نیستند. این موارد تحقق آنها را محدود میکند: حرکت کردن و جارو زدن؟ حتما. ظرف ها مرتب کردن؟ مشکل است ولی قابل انجام خواهد بود. اشیاء کثیف را از خانه جمع کردن؟ قابل تردید است. در مورد کمک به اشخاص سالخورده و مراقبت از بیماران چطور؟ در این مورد به شدت در حالت جستجو هستند ولی من شخص شکاکی هستم. ابزارهایامروزی چندان قابل اتکا نیستند و هر کاری را انجام نمیدهند و به اندازه کافی هوشمند نیستند. بسیاری از ربات های ذکر شده در واقع به صورت از راه دور توسط اشخاص کنترل میشوند. طراحی ربات های مستقلی که با انسان در ارتباط باشد کار مشکلی است. علاوه بر این، جنبه های اجتماعی ارتباط مثل نیاز به یک زمین مشترک بیشتر از جنبه های تکنیکی پیچیده اند، بعضی مواقع علاقه مندان به تکنولوژی از تشخیص چنین مسئله ای عاجزند. سه مسیر اصلی احتمالی برای آینده سرگرمی، وسایل منزل و تحصیلات خواهد بود. ما میتوانیم از وسایل موجود امروزی شروع کنیم و به آرامی به آنها هوشمند سازی بیشتر ، قابلیت و نقش های بیشتری بدهیم. بازار ربات های سرگرم کننده که زیبا و معصوم هستنداز قبل پایه گذاری شده است.ربات های جارو زن و ظرف شوی از قبل بوده اند. تعریف ربات میتواند بسیار متفاوت باشد و معمولا به این صورت بیان میشود که هر چیزی که حرکت کند هرچند به وسیله انسان باشد را میتوان ربات نامید. من مایلم که این اصطلاح را به سیستم های اتوماتیک محدود کنم. من وسایل هوشمند منزل را به عنوان ربات در نظر میگیرم: بسیاری از قهوه سازها، مایکرویو، ماشین ظرف شویی و لباس شویی و خشک کن ها بسیار هوشمندتر و فعال تر از جاروبرقی هستند و البته گران تر هم هستند. اما این ابزارها در خانه نمی گردند و به همین خاطر بسیاری از مردم آنها را از داشتن برچسب ربات محروم میکنند. حوزه آموزش یکی دیگر از موارد مهم است. یکسری ابزار از گذشته تا کنون به آموزش کمک کرده اند. ربات های امروزی می توانند برای شما با صدایی مطلوب متن ها را بخوانند. میتوانند زیبا و دوست داشتنی باشند، شاهد این امر عکس العمل خوب مردم نسبت به عروسک های شبیه حیوانات است که در اسباب بازی فروش ها وجود دارد. چرا ربات ها برای مقاصدی مثل آموزش الفبا یا خواندن و یا آموزش لغات و تلفظ ، پایه های ریاضی و حتی منطق برای بچه ها استفاده نشوند؟چرا برای موسیقی و هنر، جغرافیا و تاریخ استفاده نشوند؟ و چرا این تکنولوژی را به کودکان محدود کنیم؟ جوانان هم میتوانند برای آموزش از ربات ها کمک بگیرند. اکنون میتوان از طرحی گفت که شایسته تحقیق است: ربات ها به عنوان معلم، نه به منظور جایگزینی با مدرسه و ارتباطات انسان ها بلکه برای پشتیبانی از آنها. زیبایی این طرح در این است که دستگاه های امروزی قابلیت اجرای آن را دارند. آنها چندان به تحرک یا دستکاری های پیچیده ای احتیاج ندارند. بسیاری از تکنولوژی هایی که نیل استفنسون، معلم کودکان در کتابش با نام " عصر طلایی یا چاشنی معروف یک زن جوان " در سر می پروراند اکنون ارزش تحقیق کردن را دارند. تمام مسائلی که در این کتاب در مورد یک دستیار اتوماتیک مطرح شده است را میتوان با قدرت بیشتری در مورد ربات ها هم اجرا کرد. ربات های چند منظوره ذکر شده از مشکلات زمینی در عذاب خواهند بود. چگونه با آنها ارتباط برقرار کنیم؟ چکونه فعالیت هایمان را به صورتی هماهنگ کنیم که با دیگری تداخل نداشته باشد؟چگونه به آنها را راهنمایی کنیم؟ تصور من این است که وقتی آنها بالاخره به وجود بیایند کمتر میتوانندد ارتباط برقرار کنند: آنها راهنمایی هایی را دریافت خواهند کرد (خانه را تمیز کن، ظرف های کثیف را بردار، برایم یک نوشیدنی بیاور) و آنها سرانجام برای انجام این وظایف خواهند رفت و ما را برای فهمیدن عادت هایشان و پیروی از مسیرشان تنها میگذارند. وسایل هوشمند خانه، ربات هایی که جارو میکنند و چمن زنی میکنند جزء ربات های با وظیفه خاص هستند.آنها مشکل برقراری ارتباط ندارند چون فهرست کوچکی از فعالیت ها را دارند، بنابراین آنها فقط می توانند چند مورد جایگزین را به صاحبشان بدهند. بنابراین ما می دانیم که باید از آنها چه انتظاری داشته باشیم و چگونه با آنها در تعامل باشیم. برای این وسایل شرط برقراری ارتباط وجود یک فهم مشترک در مورد وظایفی است که برای آن طراحی شده اند و همچنین قدرت ها و محدودیت های آنها و محیطی که در آن به انجام وظیفه می پردازند.نتیجه این امر کاهش در مشکل برقرار کردن ارتباط و مشکلات کمتر به نسبت ابزار چند منظوره است. ربات ها برای کاوش در مناطق خطرناک یا جاهایی که دسترسی به آنها مشکل است بسیار پرکاربرد است، مانند درون آتش فشان ها، لوله های فاضلاب و یا سطح مریخ و ماه. آنها برای ارزیابی آسیب ها و یافتن بازماندگان حوادث و زمین لرزه و حملات تروریستی مناسبند. از آنجایی که این موارد جزء فعالیت های سخت به حساب می آیند و هزینه برای آنها مسئله ای بحرانی نیست، می توانند به ما تجربه هایی بدهند تا به وسیله آن هزینه ها را کاهش داده و این ابزار را برای همه در دسترس قرار دهیم. و سرانجام یک نوع از ربات تولید خواهد شد: ربات های متصل و در رابطه با یکدیگر. ماشین ها از قیل شروع به صحبت با یکدیگر کرده اند و در بزرگراه ها میتوانند با تقاطع ها و تغییر مسیر هماهنگ شوند. در آینده ای نزدیک ماشین ها به رستوران ها این اجازه را می دهند که موقعیت آنها را داشته باشند و به این ترتیب منو غذا را به مسافران پیشنهاد دهند. ماشین های لباس شویی صحبت با خشک کن ها را آغاز کرده اند و به این ترتیب خشک کن لباس میداند که چه چیزی را به او خواهند داد و از چه تنظیماتی باید استفاده کند. در ایالات متحده مردم ماشین های لباسشویی و خشک کن های جداگانه دارند واگر این الگو ادامه پیدا کند سرانجام به مرحله ای می-رسیم که لباس ها به صورت خودکار از لباس شویی به خشک کن منتقل شوند ( در اروپا و آسیا، یک دستگاه هر دو کار را انجام میدهد و انتقال بین این دو وظیفه بسیار راحت تر است). در رستوران ها و خانه ها، ظروف به صورت خودکار در ماشین ظرف شویی قرار خواهند گرفت و سپس به صورت خودکار به آبدارخانه فرستاده خواهند شد. وسایل منزل فعالیت های خودشان را هماهنگ خواهند کرد، و به این ترتیب سر و صدای کمتری ایجاد می کنند و با به تاخیر انداختن فعالیت هایشان در ساعات اوج مصرف هزینه انرژی را کاهش می دهند. ربات ها در حال ظهورند و با این امر ما با مشکلاتی هم مواجه خواهیم بود . آنها همین الان هم به صورت اسباب بازی ها، وسایل سرگرمی و حیوانات ساده حضور دارند. و سرانجام آنها به همدیگر خواهند پیوست و توانایی خواندن داستان و فعالیت های آموزشی مثل خواندن، آموزش ساختار زبان،تلفظ و ریاضیات را پیدا خواهند کرد. آنها به ما اجازه می دهند که خانه را از راه دور تحت نظر داشته باشیم ( و همچنین نزدیکان سالخورده را ). و به زودی وسایل منزل و اتو مبیل ها جزئی از شبکه ارتباط هوشمند خواهند شد.ربات های با هدف خاص از لحاظ تعداد، قدرت و دامنه فعالیت افزایش پیدا می کنند. و در آخر ربات های چند منظوره در دهه های بعد به وجود می آیند.
یکی از اجتناب ناپذیر ترین جنبه های تکنولوژی راه پیدا کردن آن به زندگی روزانه ی ما است.
درس و کلاس های درس نیز از این قانون پیروی می کنند. تخته های الکترونیک، ارائه ی مطالب و استفاده از تخته سیاه های هوشمند با حافظه ی جانبی، استفاده از لپ تاپ و تبلت به جای قلم و کاغذ همه از دست آورد های تکنولوژی هستند که وارد کلاس های درس شده اند.
این جا به جایی ها برخی از معلمان را به وحشت انداخته است زیرا برخی از این تکنولوژی های تمام اطلاعات را بهتر از معلم ها تجزیه و تحلیل می کنند با استفاده از برنامه ریزی های از پیش تعیین شده ای که بر روی آن ها تعبیه شده است قابلیت این را دارند که تمامی جنبه های حیاتی یک مبحث را با استفاده از الگوریتم هایشان بسنجند. این کار ها را یک انسان هم می تواند انجام دهد اما قدرت پردازش و سرعت یک ماشین اغلب از انسان بیشتر است از این رو بیشتر معلم ها از این که یک ربات در امر آموزش با آن ها سهیم شود هراس دارند.
هر چقدر هم که معلم ها از این تکنولوژی هراس داشته باشند باید خود را با آن تطبیق دهند زیرا از سال 2014 ساخت ربات های جایگزین و یا تکمیل کننده ی کار معلم ها در خط طراحی و تولید قرار گرفته اند.
یکی از این نمونه های تولید شده رباتمعلم نام دارد که در برخی از کلاس های آنلاین چینی نقش معلم را ایفا می کند. این ربات که به نام مووک نیز خوانده می شود در حیطه های مختلف ریاضی، فیزیک، جغرافیا و زمین شناسی تدریس می کند و می تواند در هر زمان به سولات دانش آموزان پاسخ دهد.
برخی از کشور های دیگر مانند چین تصمیم گرفت اند که از این تکنولوژی استفاده کنند از این رو در سال 2018 در مدرسه ی تکنولوژی استرالیا، در بخش تکونولوژی آموزشی دانشگاه آنادولو (توسط آزارس بوزکوروت خریداری شده است)، دانشگاه شمالی تگزاس و دانشگاه مرکزی تگزاس ربات های مووک شروع به کار کرده اند.
تیم دانشگاه علم و تکنولوژی استرالیا شروع به تجزیه و تحلیل کار یک ربات دیگر کرده اند که همانند مووک ربات معلم است اما این ربات جدید که بتی نام دارد از مووک باهوش تر است.
بتی همانند یک اپراتور توییتر عمل می کند به طوری که با استفاده از هشتگ ها و جستو و جوی صفحه کلیدی می تواند پاسخ شما را بدهد. برای مثال وقتی بتی یک هشتگ را می یابد تمامی مطالب مربوط به هشتگ را از ساده به پیشرفته دسته بندی می کند و آن ها را مبحث به مبحث جدا کرده و دسته بندی می کند. بتی با استفاده از هشتگ یاد گیرنده را راهنمایی می کند که در کجا به دنبال جواب سوال خود بگردد و برای یادگیری صحیح آن از کدام مبحث شروع به آموزش کند.
علاوه بر این ها بتی به گونه ای کد نویسی شده است که به راحتی می تواند سوال های شما را پاسخ گو باشد. بتی همانند یک دایره المعارف آنلاین عمل می کند که می تواند از آب و هوا گرفته تا فرمول نسبیت را برای شما پیدا کرده و برای شما توسط هشتگ هایی که پیش تر توضیح دادیم آموزش دهد.
تحقیقات تیم نشان داد که این ربات می تواند وسیله ای بسیار سودمند بوده و می توان به راحتی از آن در روند آموزش و یادگیری استفاده کرد. علاوه بر این موارد بتی می تواند سوال کننده را به خاطر بسپارد و می تواند روابط دوستانه نیز برقرار کند او می تواند مواردی که گنگ هستند را نیز توضیح دهد و کاربر می تواند مواردی را که آموخته است از مواردی که بعد های خواهد آموخت مجزا کرده و بعد از بازگشت به محیط، بتی به او روند یادآوری گذشته را یاد آوری کرده و سیر جدید آموزش را نیز به کاربر یادآوری می کند.
در انتهای تحقیق محققان به این باور رسیدند که می توان ربات ها را جایگزین معلم ها کرد.
یکی از سه دلیل حیاتی این جایگزینی این است که همواره آموزش بر روندی پای بند بوده است که در آن خود دانش آموز است که به فراگیری مطلب بپردازد. اما استفاده از آن در کلاس ها هنوز هم با اشکلاتی مواجه است از جمله بیشترین مشکل کودکان ابتدایی هستند.
هر چقدر هم که یک ربات پیشرفته باشد باز هم کودکی که اولین بار است که پا در محیط آموزشی می گذارد نیازمند بازخورد عاطفی نیز هست تا او را علاقه مند به ماندن کند.
ربات ها هرچقدر هم که بتوانند خوب عمل کنند باز هم نمی توانند احساسات انسانی را درک کنند و استفاده از یک ربات در این حیطه مستلزم یک پایگاه داده ی قوی و بسیار غنی از احساسات و درک عواطف است که به موجب آن ربات بتواند درک کند که کودک دقیق چه می خواهد. هر چند هنوز رباتی با برای سطح ابتدایی طراحی نشده است اما باید اعتراف کنیم که این ربات ها کار خود را در حیطه های دانشگاه و دبیرستان بسیار به خوبی انجام داده اند و در کشور هایی که مووک و بتی جایگزین شده اند و یا به عنوان مکمل های آموزشی مشغول به کار هستند بازخورد های خوبی را دریافت کرده اند. از این رو آینده را می توان در اختیار ربات ها دید اما کسی از آینده خبر ندارد. شاید صد ها سال بعد هنوز هم این معلم های انسانی باشند که با دانش آموزان و دانشجویان رو در رو صحبت می کنند و مشغول آموزش دادن هستند.
رکوردهای جهانی گینس یا کتاب رکوردهای جهانی، کتابی مرجع و دارای مجموعه ای از رکوردهای بین المللی است. کتاب رکورد های جهانی 2019 گینس در پنجم سپتامبر 2018 روانه بازار شد و در دسترس علاقه مندان قرار گرفت. در این کتاب جدید، شاهد کارهای خارق العاده افرادی بوده ایم که توانسته اند به واسطه فعالیت ها شان، نام و نشانی برای خود به ارمغان بیاورند. در این مقاله قصد داریم شما را با چند مورد از فعالیت های افراد یاد شده آشنا کنیم که نام شان در کتاب منتشر شده اخیر به چشم می خورد و توجهات بیشتری نسبت به سایرین به خود جلب کرده اند. با سیارک همراه باشید.
رکورد بیشترین سرعت ثبت شده توسط چهار چرخه موتوری
تام باگنال انگلیسی در پنجم سپتامبر 2017 بود که به وسیله چهار چرخه منحصر به فرد خود (یک موتور بسیار قدرتمند به آن متصل کرده بود که در تصویر مشاهده می کنید) توانست سرعتی معادل با 112.29 متر بر ساعت (معادل با 180.72 کیلومتر بر ساعت) را به ثبت برساند که در نوع خود بی سابقه بوده و توانست رکورد گینس بیشترین سرعت به دست آمده به وسیله چهار چرخه موتوری را به نام خود به ثبت برساند.
رکورد بلندترین جهش معکوس (مربوط به ورزش پارکور)
این رکورد در تاریخ بیست و دوم ژوئن 2016 و توسط رایان لونی به ثبت رسیده است. رایان ورزشکار پارکور اهل انگلستان است و توانست حرکت جهش معکوس را به گونه ای انجام دهد که ارتفاع اش از سطح زمین به چیزی حدود چهارده پا (معادل با 4.2 متر) برسد و نام خود را کتاب رکوردهای گینس سال جاری به ثبت برساند.
رکورد سریع ترین طی کردن مسافتی ده متری بر طناب معلق بر روی نوک انگشتان پا
الگا هنری، که پدری روسی و مادری آمریکایی دارد و در حال حاضر در آمریکا ساکن است، در تاریخ شانزدهم آگوست 2017 توانست در شهر کالیفرنیای ایالات متحده آمریکا مسافتی ده متری را روی طنابی معلق در مدت زمان دو دقیقه و سی و سه ثانیه طی کند و از این حیث رکورد دار سریع ترین مسافت طی شده بر روی طناب معلق شود و نام خود را در کتاب رکوردهای گینس به ثبت برساند.
رکورد بیشترین پرش معکوس پی در پی بر روی یک دست
زاما موفوکنگ، اهل آفریقای جنوبی است (در شهر تمبیسا ساکن است) و در تاریخ چهارم مارچ 2017 با سی و چهار پرش معکوس پی در پی ای که بر روی یک دست خود انجام داد، توانست از این حیث رکورد دار شده و نام خود را در کتاب رکورد های گینس به ثبت رساند.
رکورد طولانی ترین زمانی که یک فرد توانسته با شش حلقه پلاستیکی (هولا هوپ) به طور همزمان حرکت انجام دهد
بروکلین بلی، در فورت وین ایندیانای آمریکا زندگی می کند و در تاریخ یکم دسامبر 2017 توانست در آن واحد با شش حلقه پلاستیکی برای مدت زمانی معادل با 70.35 ثانیه حرکت انجام داده و از این حیث رکورد دار شود. نام بروکلین نیز در کنار سایرین در کتاب رکوردهای گینس سال جاری مشاهده می شود.
رکورد بیشترین تعداد تاسی که بر روی پنجه گربه بر روی هم قرار داده شدند
نام گربه ای که این رکورد به نام اش به ثبت رسیده است، بیبلی است و توسط فردی به نام ال سی سیو، اهل مالزی نگه داری می شود. تعداد تاسی که بر روی پنجه این گربه قرار گرفت، ده عدد بود و در تاریخ هجدهم ژوئن 2017 و در شهر سلانگور مالزی بود که این رکورد به ثبت رسید.
رکورد بیشترین تعداد بیرون دادن آتش از دهان در یک دقیقه، به هنگام انجام حرکت پرش معکوس
رایان لونی اهل کشور انگلستان است و کسی است که این رکورد را به نام خود به ثبت رسانده است. رایان ظرف مدت یک دقیقه و در حالی که پرش معکوس انجام می داد (همانگونه که در تصویر مشاهده می کنید) توانست چهارده بار از دهان خود آتش بیرون دهد (کاری که در سیرک ها برای سرگرمی مردم انجام می دهند) و از این حیث رکورد دار شود. این رکورد در تاریخ بیست و سوم ژوئن 2017 و در شهر آنتریم انگلستان به ثبت رسید.
رکورد بیشترین تعداد طناب زدن انسان به همراه یک گربه
راشل گریلز در انگلستان زندگی می کند و گربه ای به نام جسیکا دارد. راشل مدت ها با گربه خود برای ثبت این رکورد تمرین کرده و حرکت را به او آموزش داد و در نهایت این دو توانستند با یکدیگر پنجاه و نه بار متوالی طناب بزنند. این رکورد در یازدهم دسامبر 2016 و در شهر لوتون انگلستان به ثبت رسید.
رکورد بیشترین تعداد مشعل پرتاب شده (از حرکات شعبده بازی) بر روی تخته متحرک
جاش هورتون آمریکایی نام شخصی است که توانست این رکورد را به نام خود به ثبت رساند. در تاریخ سوم نوامبر 2017 بود که جاش، در حالی که بر روی یک تخته متحرک قرار گرفته بوده و باید تعادل خود را نگه می داشت (تخته ای که در تصویر مشاهده می کنید)، توانست در آن واحد این حرکت را با پنج مشعل شعله ور انجام دهد و از این حیث رکورد دار شود.
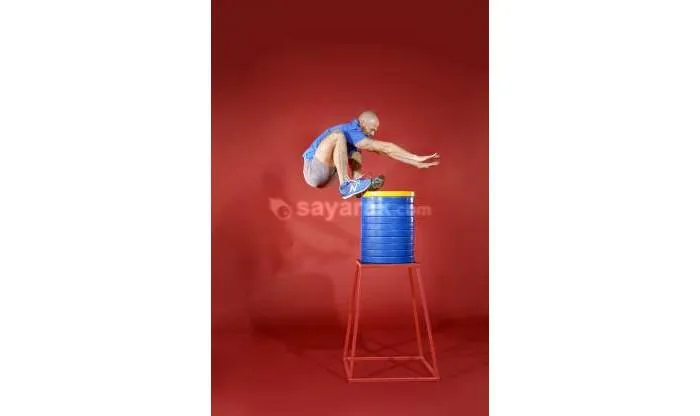
رکورد بلندترین پرش به ثبت رسیده در حالت ایستاده (بدون استفاده از هیچ وسیله به خصوصی)
اوان اونگار کانادایی نام شخصی است که توانسته این رکورد را به نام خود به ثبت برساند. در سیزدهم می 2016 و در شهر اونتاریوی کانادا بود که اوان اونگار موفق شد به روی وزنه هایی بپرد که 5.3 پا (معادل با 1.62 متر) از سطح زمین فاصله داشتند و نام خود را در کتاب رکوردهای گینس به ثبت برساند.
رکورد مسن ترین شخصی که بند بازی می کند
بتی گودهارت آمریکایی، نام شخصی است که این رکورد را به نام خود به ثبت رسانده است. در حال حاضر هشتاد و چهار سال و 249 روز از عمر این پیرزن آمریکایی می گذرد. در یکم جولای 2017 و در شهر سن دیگوی (کالیفرنیا) ایالات متحده آمریکا بود که این رکورد به ثبت رسید.
رکورد بیشترین تعداد دونات آغشته به خاک قند خورده شده در سه دقیقه
رکورد بیشترین تعداد این نوع به خصوص از دونات که ظرف مدت سه دقیقه خورده شده است، به نه عدد می رسد و کوین استارهل آمریکایی نام شخصی است که این رکورد در کتاب رکوردهای جهانی گینس به نام اش به ثبت رسیده است. در دوازدهم ماه می 2012 بود که در دفتر فعالیت های سازمان گینس در نیویورک آمریکا این رکورد به طور رسمی به ثبت رسید.
رکورد بزرگترین واگن اسباب بازی
طول این واگن اسباب بازی که نام اش در کتاب رکوردهای گینس به ثبت رسیده به 8.05 متر می رسد؛ بلندی آن معادل با 3.55 متر بوده و 3.59 متر عرض دارد. این واگن اسباب بازی به رابرت پسون تعلق دارد که در ایلینویز، شیکاگوی آمریکا زندگی می کند و در تاریخ بیستم سپتامبر 2016 بود که نام واگن اسباب بازی اش به طور رسمی برای لحاظ شدن در کتاب سال جاری به ثبت رسید.
مسن ترین دی جی حرفه ای باشگاه های شبانه
مسن ترین دی جی حرفه ای باشگاه های شبانه سومیکو وامورو نام دارد و اهل ژاپن است. در حال حاضر هشتاد و سه سال و صد و هجده روز از عمر این دی جی می گذرد و طی روندی ماهانه در یکی از باشگاه های شبانه توکیوی ژاپن فعالیت می کند. نام او به عنوان مسن ترین دی جی حال حاضر در بیست و پنجم می 2018 به ثبت رسید.
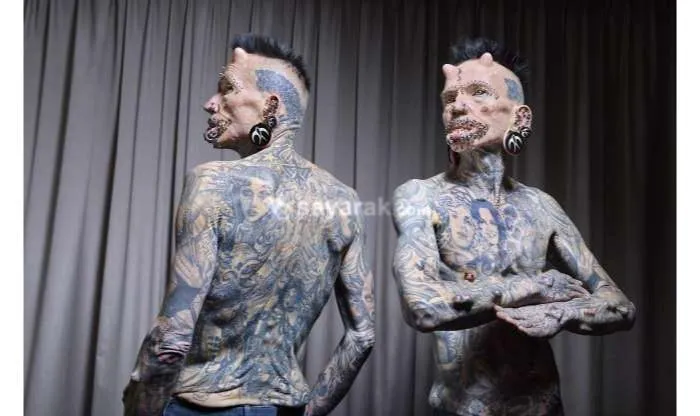
رکورد بیشترین تعداد تغییرات و تزئینات انجام شده بر روی بدن
بیشترین تعداد تغییرات و تزئیناتی که تا کنون بر روی بدن یک فرد انجام گرفته است، به پانصد و شانزده عدد می رسد. رولف بوشهولز آلمانی نام شخصی است که این رکورد را به نام خود به ثبت رسانده است. در شانزدهم دسامبر 2012 بود که این رکورد در دورتموند آلمان به طور رسمی به ثبت رسید.
رکورد طولانی ترین مسافت طی شده به وسیله اسکیت (اسکیت پوشیده شده در دست)
میرکو هانسن آلمانی نام شخصی است که پس از به دست کردن یک جفت اسکیت، توانست مسافتی پنجاه متری را در این حالت طی کند. در تاریخ شانزدهم نوامبر 2017 و در شهر راین شمالی آلمان بود که این رکورد به طور رسمی به ثبت رسید.
رکورد طولانی ترین زمان کنترل یک توپ فوتبال (به وسیله کف پا)، در حالی که فرد بر روی سقف یک خودروی متحرک قرار گرفته باشد
آش راندال انگلیسی نام شخصی است که توانست این رکورد را به نام خود به ثبت برساند. پانزدهم دسامبر 2014 بود که راندال در فرودگاه کاردیف انگلستان بر روی سقف یک خودرو قرار گرفته و پس از به حرکت در آمدن آن، به حالتی که در تصویر مشاهده می کنید، اقدام به زدن روپایی کرد و این روند برای مدت نود و سه ثانیه ادامه یافت و نام راندال را در کتاب رکوردهای گینس به ثبت رسانید.
رکورد بیشترین تعداد سوسیس آماده شده در یک دقیقه
بری جان کرو، اهل ایرلند است و توانست این رکورد را به نام خود به ثبت برساند. او ظرف مدت یک دقیقه توانست هفتاد و هشت سوسیس آماده کند. سوم آپریل 2017 بود که او توانست این رکورد را در شهر کاوان ایرلند به طور رسمی به ثبت برساند.
رکورد طولانی ترین زمانی که فردی قادر به نگه داشتن گیتار بر روی پیشانی خود بوده است
جاش هورتون آمریکایی شخصی است که توانست این رکورد را به نام خود به ثبت برساند. او برای مدت زمان هفت دقیقه و 3.9 ثانیه توانست گیتار را، همانگونه که در تصویر مشاهده می کنید، بر روی پیشانی خود نگه دارد. این رکورد در ایالت تگزاس آمریکا و در تاریخ هفدهم نوامبر 2017 به طور رسمی به ثبت رسید.
رکورد بزرگترین قلاب های بافتنی
قلاب های بافتنی ای که در تصویر مشاهده می کنید، طول شان به 4.42 متر می رسد و قطر آن ها نیز 9.01 سانتیمتر است. الیزابت باند انگلیسی این قلاب های بافتنی را ساخته است و به واسطه آن نام خود را در کتاب رکوردهای گینس به ثبت رساند. این قلاب های بافتنی در تاریخ سیزدهم ژوئن 2017 و در ویلت شایر انگلستان اندازه گرفته شده و به طور رسمی در کتاب رکوردهای گینس به ثبت رسیدند.
رکورد بزرگترین ربات شش پایی که قابلیت راندن آن وجود دارد
نام این ربات شش پای غول پیکر مانتیس است و بلندی آن به 2.8 متر می رسد و پنج متر قطر دارد. این ربات توسط یک فرد انگلیسی به نام مت دنتون ساخته شده است. مت در همپشایر انگلستان زندگی می کند و در تاریخ پانزدهم نوامبر 2017 بود که به طور رسمی، نام ربات ساخته شده توسط او به کتاب رکوردهای گینس راه یافت.
رکورد سریع ترین زمانی که طی آن فردی قادر بوده پانزده بار پیاپی از روی موانعی به وسیله دوچرخه اقدام به پرش کند
زمان ثبت شده برای این رکورد معادل با 13.88 ثانیه است و جو اوکلی انگلیسی نام فردی است که قادر بوده این رکورد را به نام خود به ثبت برساند. نوزدهم آگوست 2012 بود که مسابقات خیابانی دوچرخه سواری در نیو کاسل انگلیس برگزار شده و طی آن جو اوکلی توانست به طور کاملا اتفاقی این رکورد را از آن خود کند و نام اش را وارد کتاب رکوردهای گینس کند.
رکورد بیشترین تعداد پرش یک سگ از روی طناب هایی که توسط دو نفر هدایت می شوند، در مدت یک دقیقه
سامانتا واله، اهل آمریکا است و سگی به نام جرونیمو دارد که توانست صد و بیست و هشت بار پیاپی (ظرف یک دقیقه) از روی طناب هایی که توسط دو نفر هدایت می شوند بپرد. این رکورد در تاریخ هفتم آپریل 2014 و در ایالات متحده آمریکا به طور رسمی به ثبت رسید.
رکورد بلندتری پرش ثبت شده توسط یک سگ
نام سگی که این رکورد به نام اش به ثبت رسیده، فردریک است. این سگ توانست از مانعی به ارتفاع یک متر و نود سانتی متر بپرد که در نوع خود بسیار قابل توجه است. در چهاردهم سپتامبر 2017 و در مری لند ایالات متحده آمریکا بود که به طور رسمی این رکورد به ثبت رسید.
بزرگترین مجموعه اسباب بازی های ساخته شده توسط آجرهای پلاستیکی (آجرهایی شبیه به لوگو که به یکدیگر متصل می شوند، این مجموعه اختصاصی است و اسباب بازی ها فروشی نیستند)
فرانک اسموز، نام شخصی است که این رکورد را به نام خود به ثبت رسانده است. او در استرالیا زندگی می کند و سه هزار و هشتصد اسباب بازی متفاوت دارد که به وسیله این آجرهای پلاستیکی ساخته شده اند. نهم می 2017، تاریخی است که به طور رسمی نام این مجموعه اسباب بازی ها برای کتاب گینس در نظر گرفته شد (در ملبورن استرالیا).
رکورد بزرگترین مجموعه وسایل و امکانات مربوط به دلقک ها
اف ام کان، اهل آلمان است و 4348 عدد وسیله جداگانه در مجموعه خود دارد که همگی متعلق به امکانات و وسایل مربوط به دلقک ها هستند. یازدهم آپریل 2017 و در هلند بود که این رکورد به طور رسمی برای ثبت در کتاب رکوردهای گینس سال جاری مستند شد.
در این مقاله در نظر داریم که مراحل اجرای مهندسی فرایندهای کسب و کار را با سطح جزئیات بالایی بررسی کنیم. به عبارت دیگر، هدف ما در این جا درک اجرای BPR در سطح جزئی تر میباشد.
تعریف ساختار سازمان پروژه
ساختار سازمان پروژه (POS) ترکیبی از مردم (یا موقعیت ها) می باشد که مستقیماً در هر گونه تلاش پروژه ای شامل خواهند شد. یک POS مشابه یک چارت سازمانی می باشد، باستثنای این که POS تنها به یک پروژه رسیدگی می کند. این ساختار گزارش و همچنین ساختار تعدیل برای یک پروژه را توصیف می کند. یک POS معمولی به شکل زیر خواهد بود: توصیف یک POS قبل از آغاز پروژه مزایای متعددی را ارائه می دهد: • POS اجرای بدون اشکال و هماهنگی تلاش های پروژه را تسهیل می کند. • امکان هر گونه ابهام، اختلالات، یا تعارض را کاهش می دهد. • ارتباط میان اعضای تیم را با مشخص کردن زنجیره مناسب قرارگاه، ترغیب می کند.
شناسایی ذینفعان و اهداف آن ها
قبل از شروع هر گونه فعالیت مهندسی مجدد، شناسایی تمامی سهامداران در این فرایند ضروری می باشد. به طور معمول، سهامداران هر فرایند صاحب پروسه، کارکنان دیگر، و مشتریانی هستند که از فرایند ارزشی را منتج می کنند. درک انتظارات هر یک از این گروه ها و شناسایی حوزه هایی که در آن این فرایند قاصر از آن انتظارات است ضروری می باشد. تنها پس از انجام این تحلیل شکاف، اهداف اعمال BPR باید تعیین شوند.
تطبیق اهداف با تصور و مأموریت
به منظور به دست آوردن نتایج قابل توجه، ضروری است که اهداف فعالیت مهندسی مجدد در تطبیق کامل با تصور و مأموریت سازمان باشند. به عبارت دیگر، اهداف پروژه باید همگام با اهداف استراتژیک باشند. چنین تطبیقی در رسیدن به پیامدهایی که دارای اهمیت استراتژیک به شرکت و همچنین به مشتری می باشند، کمک خواهد کرد. گذشته از آن، اگر اهداف کاملاً متناسب با تصویر بزرگتر باشند، جذب حمایت از مدیریت ارشد در فعالیت های BPR آسان تر خواهد بود.
عناصری که موفقیت یا عدم موفقیت نهایی هر پروژه را تعیین خواهند کرد، عوامل موفقیت بحرانی یا CSF-ها نامیده می شوند. عوامل موفقیت بحرانی (CFS-ها) فضاهایی هستند که باید به آن ها توجه مداوم و ویژه ای توسط گروه BPR داده شود. شناسایی CSF-ها برای هر فعالیت BPR باید در مرحله اول انجام گیرد. این کار تضمین خواهد کرد که هیچ کدام از عناصر حیاتی نادیده گرفته نشده است یا در مراحل بعدی پس از اجرا نادیده انگاشته نشده اند.
درخواست مشاوره و همکاران فناوری
سازمان، بر عهده گرفتن BPR، ممکن است فاقد حوزه یا تخصص فنی لازم برای اجرای تغییرات باشد. اگر چنین باشد آن ها باید با همکاران خارجی برای پروژه مشاوره کنند. چنین درخواستی یک فرایند زمان بر است زیرا شامل مراحل مختلف از قبیل لرسال درخواست پیشنهاد (RFP)، پیشنهادات ارزیابی، و اعطای قرارداد می باشد. بنابراین، باید در مرحله برنامه ریزی پروژه انجام گیرد. شرکت باید با پشتکار لازم در انتخاب یک شریک عمل کند. شرکا باید بر اساس تخصص و تناسب فرهنگی آن ها با سازمان انتخاب شوند.
تشخیص فرایند فعلی
همه کارورزان با این موضوع موافق نیستند، ولی درک وضعیت فعلی فرایندها قبل از تلاش برای مهندسی مجدد آن ها بسیار مهم می باشد. مگر در مواردی که فرایندهای فعلی به خوبی مستند و درک نشوند، گروه مهندسی مجدد ممکن است برخی از جزئیات فرایند را نادیده بگیرند. از این رو صاحب پروسه (همراه با گروه خود) باید برای ثابت کردن این که از هیچ کدام از جزئیات صرفنظر نشده است، در این مرحله دخیل باشند.
نقشه برداری فرایندهای فعلی
ابزارهای متعددی به منظور فرایندهای نقشه برداری وجود دارند. قدرتمندترین آن ها تصویرهای فرایند و نمودارهای فعالیت می باشند. یک تصویر فرایند دارای شرح مفصلی از آن چه فرایند انجام می دهد، چه کسی مسئول چه چیزی است، و چگونه موفقیت فرایند اندازه گیری می شود، می باشد. نمودار فعالیت، دیاگرامی است که تمام عملیات و وظایف شامل در یک فرایند را نشان می دهد. کارکنانی که مسئول این فرایند هستند باید در BPR در این مرحله شامل باشند.
تحلیل هزینه اجرا
این مرحله به تحلیل عمیق هر فعالیت در یک فرایند رسیدگی می کند. در مرحله اول، زمان گرفته شده توسط هر فعالیت برای تکمیل باید ارزیابی شود. در مرحله دوم، هزینه هر فعالیت از نظر منابع باید در این مرحله اندازه گیری شود. ابزارها و روش های شبیه سازی برای اجرای این ارزیابی موجود می باشند.
تحلیل شکاف اجرا
زمانی که مرحله بالا به اتمام رسید، گروه BPR قادر به سنجش عملکرد فعلی نشان داده شده توسط فرایندها در برابر عملکرد مورد نظر خواهند بود. این مرحله از این نظر حیاتی است که، زمانی که گروه مهندسی مجدد فرایندهای مربوط به آینده را طراحی می کند از این که شکاف ها و قطعی های شناسایی شده در اینجا متصل شده اند مطمئن خواهد بود.
شناسایی فرایندهای ارزش افزوده
سازمان با گذشت زمان، و همچنین فرایندها تکامل می یابند. با تغییر در نیازهای کسب و کار و عوامل خارجی دیگر، ارزش تحویل داده شده توسط یک فرایند تغییر می کند. در نتیجه، همه فرایندهای درون یک سازمان ارزش افزوده نیستند. برخی از آن ها منسوخ و اضافی می باشند. این مرحله از اجرای BPR به منظور طبقه بندی فرایند به صورت ارزش افزوده یا فاقد ارزش افزوده (NVA) می باشد. NVA-ها در مراحل بعدی کاهش یافته اند.
طراحی مجدد فرایند
هدف از این مرحله ایجاد یک وضع نهایی دلخواه برای فرایند متحمل طرح مهندسی مجدد می باشد. این مرحله شامل چند تصمیم حیاتی می باشد که گروه BPR باید از نظر انتخاب فرایند آینده از گزینه های موجود و توسعه متریک هایی برای اندازه گیری موفقیت فرایند مهندسی مجدد بگیرد.
مطالعه بهترین فرایندها در طبقه
اولین گام در طراحی مجدد یک فرایند سنجش ان در برابر فرایندهای مشابه دیگر اجرا شده در جای دیگر می باشد. سنجش می تواند هم به صورت داخلی (بخش ها یا واحدهای تجاری دیگر درون همان سازمان ها) یا به صورت خارجی (لزوماً نه در برابر رقبا یا درون همان صنعت) انجام گیرد. پیامد عمل سنجش مجموعه ای از بهترین روش های دنبال شده توسط شرکای سنجش می باشد.
فرایندهای جدید طراحی
در این مرحله، گروه مهندسی مجدد گزینه های مختلف ایجاد شده توسط عمل سنجش را ارزیابی می کند. بر اساس سازگاری با اهداف استراتژیک سازمان، یکی از گزینه ها انتخاب می شود. فرایند انتخاب شده سپس با قواعد سازمان دستخوش BPR وفق داده شد. تصاویر فرایند جدید و نمودارهای فعالیت در این مرحله آماده می شوند.
اعتبار فرایند جدید در برابر CSF
همان طور که قبلاً ذکر شد، CSF-ها برای موفقیت کلی پروژه حیاتی هستند. از این رو، در این مرحله، فرایند جدید برای کفایت آن در تمام عوامل موفقیت بحرانی ارزیابی می شود. اگر کافی نباشد، فرایند به منظور تطبیق تمام CSF-ها، اصلاح می شوند.
اجرای تحلیل هزینه و سود فرایندهای مهندسی مجدد
ترتیب اجرای فرایندهای مهندسی مجدد بر اساس سودهای منتج شده و هزینه های شامل در آن ها تصمیم گرفته می شود. فرایندهایی که حداکثر سود را در کوتاه مدت فراهم می کنند اولین فرایندهایی هستند که اجرا می شوند.
توسعه متریک های KPI
درجه موفقیت هر فرایند توسط متریک های معینی به عنوان شاخص های کلیدی عمکرد یا KPI-ها تعیین می شود. در این مرحله از BPR، متریک های KPI برای فرایندهای مهندسی مجدد توسعه داده می شوند. شاخص های کلیدی عملکرد (KPI-های) توسعه یافته در این جا، نقش بسیار حیاتی در در مرحله آخر BPR که در آن بر عملکرد فرایند نظارت خواهد شد، خواهند داشت.
تعیین R&R جدید
فرایند مهندسی مجدد به یک انحراف از ساختار گروه فعلی و زنجیره قرارگاه موجود نیاز داشته باشد. گروه BPR، در این مرحله، نقش ها و مسئولیت های جدید را به منظور اجرای فرایندهای مهندسی مجدد شرح خواهد داد.
برنامه ریزی اجرا و شروع عملیات
این مرحله ای است که در آن تلاش های مهندسی مجدد با حداکثر مقاومت مواجه می شوند ، از مخالفان ضد تا دشمنان منفعل، که همه آن ها مصمم به حذف تلاش ها می باشند. به این دلیل است که برنامه های مدیریتی تغییر برای ایجاد فرهنگ پذیرش باید همگام با اجرای BPR آغاز شوند. در این مرحله ما بر روی توسعه یک طرح پروژه ای برای اجرای فرایندهای مجدداً طراحی شده در قالب ساختار تفکیک کار تمرکز می کنیم. در این جا، ما نیاز به تمرکز بر روی توسعه رابطه با شرکای اجرا داریم تا از انتقال بدون اشکال از فرایندهای قدیمی به فرایندهای جدید به منظور به حداقل رساندن مقاوت تغییر و ارائه به صورت پیمان اطمینان حاصل کنیم. در ادامه مقاله مهندسی فرایندهای کسب و کار......... به ارزیابی حوزه های اتوماسیون می پردازیم.